| UD(Ubiquitous Display)とは,人に対してより分かりやすく快適な情報提供を目的として,2006年より本研究室で開発を進めている移動投影ロボットです.UDは,車輪型移動ロボットの上に,上下左右に動かすことが可能な機構を備えたプロジェクタを搭載しています(Fig.1). この機構を活かし,UD自らが移動しながら情報提供を行うことで,設置場所に囚われることなく,壁や床などあらゆる場所に情報を提示することが可能となります.これにより,利用者はいつでも・どこでも・何も持つことなく情報を得ることができます.また,プロジェクタによる映像投影により視覚的な情報提示を行うだけでなく,プロジェクタの特性を活かし,実在する物に映像を被せることで拡張現実感(AR)を実現し,より直観的で分かり易い情報提供を実現しています. UDは,従来の情報提示である掲示板といった利用者が自ら情報を探しに行く受動的な情報提示ではなく,ロボットが人に対して情報提供を行うより能動的な新たな情報提供の在り方の実現を目指しています. |
 Fig.1 Ubiquitous Display |
研究内容
視覚的情報支援のための自律行動モデルUDは視覚的情報支援を行うという観点から情報提示を行う際,人にとって提示された情報の取得が困難にならず,かつUD自身が正確に情報を提示できるよう振る舞うことが重要となる.そのため,投影情報の欠落,移動ロボットを用いることから人とロボットとの立ち位置問題や障害物や人との接触といった問題を考慮しなければならない(Fig.2). |
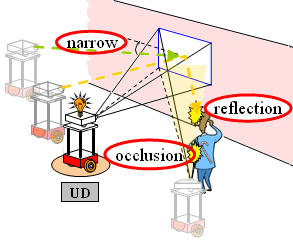 Fig.2 行動モデルの要素 |
 Fig.3 大型公共施設における情報支援の例 |
大型公共施設において情報支援を行う
|
情報投影のためのLRFを用いた人物位置・向き推定UDの活動には,環境地図・自己位置・人物位置・障害物位置といった情報が必要不可欠である.現状では,実験環境に設置したセンサなどによりそれらの情報をUDに与えているが,今後はロボット自身による独立した環境把握が行えることが望ましい. |
 Fig.4 LRFによる距離画像 |
 Fig.5 アナモルフォーズによる立体視 |
アナモルフォーズを活用した
|
UDに関する主な研究業績
| タイトル | 著者名 | 発表先(講演会名,学会誌名) | 巻(Vol.) | 号(No.) | ページ | 年月日 |
| 2012年度 | ||||||
| Building a Behavior Model for the Ubiquitous Display to be used in a large-scale public facility | Tomoyuki Shiotani, Kosuke Maegawa, Kenji Iwamoto, Joo-Ho Lee | Ubiquitous Robots and Ambient Intelligence 2012 | pp.228-233 | 2012.11 | ||
| 大型公共施設においてサービス提供を行うUbiquitous Display のための行動モデルの構築 | 塩谷朋之, 前川晃祐,岩本健児,李周浩 | 日本ロボット学会学術講演会 | Vol.30 | 2N2-4 | 2012.9 | |
| Ubiquitous Displayによる情報投影のためのLRFを用いた人物位置・向き推定 | 前川晃祐, 塩谷朋之, 李周浩 | 日本機械学会ロボティクス・メカトロニクス講演会2012 | 1A1-P03 | 2012.5 | ||
| Estimation of Human Position and Direction for Projection of Ubiquitous Display by using Laser Range Finder | Kosuke Maegawa, Tomoyuki Shiotani and Joo-Ho Lee | DUT-RU Joint Workshop on Information Science and Engineering | 2012.3 | |||
| 2011年度 | ||||||
| A behavior model of autonomous mobile projection robot for the visual information | Tomoyuki Shiotani, Kosuke Maegawa, Joo-Ho Lee | Ubiquitous Robots and Ambient Intelligence 2011 | pp615-620 | 2011.11 | ||
| 視覚的情報支援のための自律移動投影ロボットの行動モデル | 塩谷朋之, 前川晃祐,李周浩 | 日本ロボット学会学術講演会 | Vol.29 | 3G2-7 | 2011.9 | |
| 動的環境下における移動投影ロボットの行動モデル | 塩谷朋之, 高橋亮, 李周浩 | 日本機械学会ロボティクス・メカトロニクス講演会2011 | 2A1-D07 | 2011.5 | ||
| 2010年度 | ||||||
| 移動投影ロボットを用いた人に効果的な視覚情報投影の検証 | 塩谷朋之, 高橋淳子, 高橋亮, 李周浩 | 第11回計測自動制御学会システムインテグレーション部門講演会(SI2010) | vol.108 | No.138 | pp1531-1534 | 2010.12 |
| Behavior Model for Ubiquitous Display to Interact with Human | Ryo Takahashi, Joo-Ho Lee | The Third Asian Joint Workshop on Information Technologies | 2010.10 | |||
| Active Information Display without Occlusion using UD-mp | DongKyun Cho, JeongEom Lee, JooHyung Kim, JooHo Lee, GwiTae Park | International Conference on Control, Automation and Systems 2010 | p399-402 | 2010.10 | ||
| 移動投影ロボットの振る舞い行動モデル 第2報障害物回避と情報投影を考慮した人物追従 | 高橋亮, 李周浩 | 日本ロボット学会学術講演会 | Vol.28 | 3Q1-3 | 2010.9 | |
| Paraphrase-Based News Display Service Using Ubiquitous Display | Joo-Hyung Kim, Jeong-Eom Lee, Sang-Jun Kim, Gwi-Tae Park, Joo-Ho Lee | 2010 IEEE International Conference on Intelligent Computing and Intelligent Systems(ICIS 2011) | 2010.8 | |||
| インテリジェント環境と連携した視覚情報支援のための移動投影ロボットの振る舞いモデル | 宮下智至, 高橋亮, 李周浩 | 日本機械学会ロボティクス・メカトロニクス講演会2010 | 1P1-C20(1)-(4) | 2010.6 | ||
| 錯覚効果を用いたプロジェクタによる影表現 | 東晃佑, 宮下智至, 李周浩 | 日本機械学会ロボティクス・メカトロニクス講演会2010 | 2P1-C04(1)-(2) | 2010.6 | ||
| 2009年度 | ||||||
| Making Environments as Canvases -Ubiquitous Display, from 2D to 3D- | Joo-Ho Lee, Satoshi Miyashita and Kouseke Azuma | The 18th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN) | pp.212 | 2009.9 | ||
| Anamorphosis Projection by Ubiquitous Display in Intelligent Space | Jeong-Eom Lee, Satoshi Miyashita, Kousuke Azuma, Joo-Ho Lee, Gwi-Tae Park | HCI (6) | pp. 209-217 | 2009.7 | ||
| 移動ロボットを用いた建物内における訪問者案内画像の自動生成 | 高橋亮, 李周浩 | 日本機械学会ロボティクス・メカトロニクス講演会2009 | 2P1-F09 | 2009.5 | ||
| 回転機構付プロジェクタを用いたアナモルフォーズによる立体表現 | 東晃佑, 宮下智至, 高橋亮, 李周浩 | 情報処理学会 第71回全国大会 | 5X-1 | 2009.3 | ||
| 2008年度 | ||||||
| ユビキタスディスプレイを用いた裸眼立体アニメーション | 宮下智至, 東晃佑, 高橋亮, 李延香奄, 李周浩 | 第9回 計測自動制御学会システムインテグレーション部門講演会 | 2B3-2 | 2008.12 | ||
| UBIQUITOUS DISPLAY FOR HUMAN CENTERED INTERFACE | Satoshi Miyashita, Joo-Ho Lee | Proceedings of the 17th World Congress IFAC Seoul | pp.2436-2441 | 2008.7 | ||
| ユビキタスディスプレイ”UD-1”を用いたアナモルフォーズによる裸眼立体視の実現 | 冨板紀宏, 宮下智至, 李周浩 | 日本機械学会ロボティクス・メカトロニクス講演会 2008 | 2P2-E22 | 2008.6 | ||
| 2007年度 | ||||||
| 環境非固定型パンチルトプロジェクタの姿勢変化に起因する歪みの補正手法 | 宮下智至, 李周浩 | 第8回 計測自動制御学会システムインテグレーション部門講演会 | 3L2-5 | 2007.12 | ||
| Human Centered Ubiquitous Display in Intelligent Space | Joo-Ho LEE | The 33rd Annual Conference of the IEEE Industrial Electronics Society(IECON) | pp22-27 | 2007.11 | ||
| 2006年度 | ||||||
| 映像投影装置を持つ移動ロボットによる避難誘導システム | 原田哲也, 伴重尚, 李周浩 | 第7回 計測自動制御学会システムインテグレーション部門講演会 | 2I1-2 | 2006.12 | ||